A new method for detecting brightness and chroma of outdoor full-color LED display
- author:
- 2024-05-25 14:27:50
LED is one of the fastest-growing industries in the world today. Its high brightness, low energy consumption, and long life make LED displays have obvious advantages in the field of outdoor flat panel displays. However, differences in optical and electrical characteristics between LEDs usually cause inconsistent brightness and chromaticity of LED displays, which in turn destroys the white balance of the display, reduces display quality, and in serious cases, causes problems such as mosaic and mosaic. When solving this problem, previous research has mainly focused on the differences in optoelectronic characteristics of individual LEDs, with the purpose of finding suitable compensation curves for the three primary colors of RGB (red, green, and blue) LEDs to correct their drive control parameters to improve the display effect. This type of detection and correction scheme can better solve serious problems such as tiles and mosaics. However, there are characteristics differences between LEDs of the same primary color and the same batch, and the LED full-color display contains many LED pixels. Various problems will inevitably occur during the production and manufacturing process, which will lead to a certain LED pixel is not bright, or produces differences in brightness and chromaticity. Therefore, this type of detection scheme has poor correction effect on individual LED pixels and limited improvement in display effect. As a compensation solution, manual visual inspection can only detect individual LED pixels with obvious differences, and requires high debugging experience of the tester; at the same time, the high brightness of the LED also increases the work intensity of the tester, resulting in low detection efficiency.
Therefore, this paper starts with the overall outdoor full-color LED display and uses digital image processing methods to quickly detect each LED pixel on the display. The purpose is to improve the detection speed and accuracy, thereby improving the outdoor full-color LED display. Display effect.
如图 1 所示,计算机通过图像采集/控制模块将 CCD(Charge Coupled Devices,电荷耦合器件)传感器采集到的 LED 显示屏的显示图像进行处理。The processing process mainly includes two parts: positioning of LED pixels and rapid detection of brightness and chromaticity.
1.1 Positioning of LED pixels
To determine the position of the LED pixel points, the collected LED display image must first be binarized. It can be known from the histogram based image thresholding method that the image consists of one or more objects and backgrounds with different gray levels that can be separated. According to this principle, multiple peaks will appear in the histogram of the image, each peak corresponding to an object or background. To separate different objects, the valley point can be used as a threshold to divide adjacent peaks.
Due to the lattice characteristics of the LED display, it is found that the two-peak distribution characteristics of the collected images (as shown in Figure 2 (a)) are very obvious in the gray histogram (as shown in Figure 2 (b)) during actual inspection. For such cases, the maximum variance threshold method of Equation (1) is used to automatically select the segmentation threshold, which not only has good results, but also is fast.
Where T represents the segmentation threshold, w0 and w1 represent the proportions of pixels with gray values less than T and greater than T in the image, respectively," 0" and" 1" represent the gray average value of the entire image, the gray average value of the part of the image with gray values less than T, and the gray average value of the part of the image with gray values greater than T, respectively.
Using the threshold T calculated in Equation (1) to binarize the gray image in Figure 2 (a) to obtain Figure 2 (c), and then horizontally and vertically project Figure 2 (c) to calculate the position of the LED pixel point on the display screen.
1.2 Rapid detection of brightness and chromaticity of LED pixels
Drawing on the YUV color model successfully used in PAL (Phase Alternating Line) TV systems (Y represents brightness, and U and V are two components that make up color), the author converts the RGB color model used in the image into the color model of Equation (2), which can easily and quickly calculate the relative brightness values of each pixel.
According to the principle of additive color in colorimetry, outdoor full-color LED displays are composed of three primary colors of RGB LEDs. Each pixel on the display can be assigned by controlling the luminous intensity of a certain primary color LED in each pixel. Various colors display colorful color images on the display. In the CIE (International Commission on Illumination) rg chromaticity diagram, chromaticity coordinates reflect the relative proportions of each of the three primary colors in the total tristimulus values. A set of chromaticity coordinates represents those colors with the same hue and same saturation but different brightness. Common characteristics.
Each pixel on the LED display can always find the corresponding area in the image to be measured. Therefore, the chromaticity of the pixel point can be determined by the RGB values in the image data in the corresponding area, and the calculation formula is as follows: Equation (3).
Assuming that the measured brightness value of the LED pixel is Y1 and the chromaticity coordinate is (r1, g1). By analyzing the dispersion of Y1 and (r1, g1), the LED pixel points with inconsistent brightness and chromaticity on the LED display can be determined.
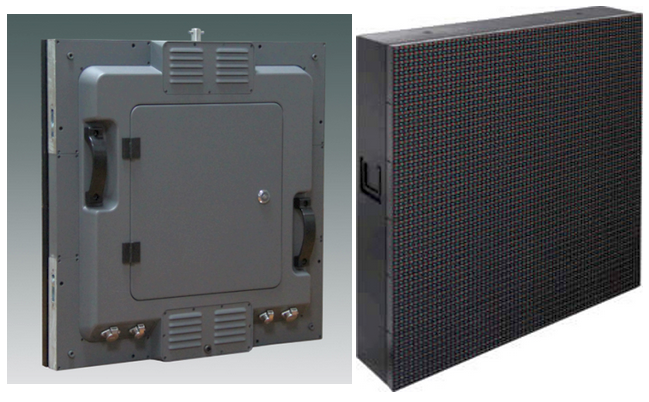
In order to verify the effectiveness of the testing method, the author used an AvaSpec-2048 micro spectrometer to conduct a comparative test of the brightness and chromaticity of the unit module of the same outdoor full-color LED display. In order to reduce the calculation amount and facilitate debugging, the author adopted the CIE rg chromaticity coordinate system, which is different from the internationally accepted CIE xy chromaticity coordinate system used by the spectrometer. Therefore, the chromaticity coordinates should be converted during testing, as shown in Equation (4).
笔者利用 CCD 图像传感器采集图像,对三合一表贴户外全彩 LED 显示屏的单元模块中的 LED 像素点进行了算法测试。
Taking blue as an example, Figure 2 (a) shows the blue image displayed by the three-in-one surface-mount unit module captured by the CCD image sensor. In order to better verify the effectiveness of the detection method, the author masked some pixels of the LED display unit module to form the black part in Figure 2 (a).
Since the LED is a self-illuminator and the luminous intensity is proportional to the driving current provided to it within a certain range, during the design, manufacturing and debugging of the driving circuit, the brightness difference can be minimized by reasonably controlling the driving current. Calculated using the average value as a standard value, it should be less than 15% to 20%. Therefore, in order to facilitate subsequent brightness correction, the experiment positioned and counted LED pixels that deviated from the overall brightness average by more than 5% in order to control the brightness difference of these pixels with large deviations within 10%. When conducting chromaticity detection, this paper refers to McAdam (D. L. MacAdam) quantifies color latitude (as shown in Figure 3). Statistics the chromaticity coordinates of each LED pixel point, calculates the geometric center of these chromaticity coordinates, and records the Euclidean distance from the geometric center greater than d0 LED pixel point (different colors d0 have different values), as shown in Equation (5).
Table 1 shows the test results (taking blue as an example), where the luminance value Y1 is the relative luminance, proportional to the maximum luminance of 255; the chromaticity coordinate is (r1, g1).
The author used the AvaSpec-2048 micro spectrometer to conduct a comparative test on the same unit module, and the test results are shown in Table 2. The comparison shows that the detection method used in this paper is effective and feasible, with fast detection speed and high accuracy.
本文运用 CCD 图像传感器及数字图像处理技术对户外全彩 LED 显示屏的亮度、色度均匀性评价提出了一种新的快速检测方法,较好地保证了显示屏上各 LED 像素点显示效果的一致性,为后续的亮度、色度校正工作提供了定量调试的参考依据,能大大提高户外全彩 LED 显示屏的检测效率和显示质量。In the next step, we will continue to carry out research on the impact of ambient light on brightness and chroma detection and methods to overcome it, as well as the automatic correction driving circuit for brightness and chroma, and finally realize the brightness and chroma value of each LED pixel on the outdoor full-color display. Accurate detection and correction.
Therefore, this paper starts with the overall outdoor full-color LED display and uses digital image processing methods to quickly detect each LED pixel on the display. The purpose is to improve the detection speed and accuracy, thereby improving the outdoor full-color LED display. Display effect.
- detection principle
如图 1 所示,计算机通过图像采集/控制模块将 CCD(Charge Coupled Devices,电荷耦合器件)传感器采集到的 LED 显示屏的显示图像进行处理。The processing process mainly includes two parts: positioning of LED pixels and rapid detection of brightness and chromaticity.
1.1 Positioning of LED pixels
To determine the position of the LED pixel points, the collected LED display image must first be binarized. It can be known from the histogram based image thresholding method that the image consists of one or more objects and backgrounds with different gray levels that can be separated. According to this principle, multiple peaks will appear in the histogram of the image, each peak corresponding to an object or background. To separate different objects, the valley point can be used as a threshold to divide adjacent peaks.
Due to the lattice characteristics of the LED display, it is found that the two-peak distribution characteristics of the collected images (as shown in Figure 2 (a)) are very obvious in the gray histogram (as shown in Figure 2 (b)) during actual inspection. For such cases, the maximum variance threshold method of Equation (1) is used to automatically select the segmentation threshold, which not only has good results, but also is fast.
Where T represents the segmentation threshold, w0 and w1 represent the proportions of pixels with gray values less than T and greater than T in the image, respectively," 0" and" 1" represent the gray average value of the entire image, the gray average value of the part of the image with gray values less than T, and the gray average value of the part of the image with gray values greater than T, respectively.
Using the threshold T calculated in Equation (1) to binarize the gray image in Figure 2 (a) to obtain Figure 2 (c), and then horizontally and vertically project Figure 2 (c) to calculate the position of the LED pixel point on the display screen.
1.2 Rapid detection of brightness and chromaticity of LED pixels
Drawing on the YUV color model successfully used in PAL (Phase Alternating Line) TV systems (Y represents brightness, and U and V are two components that make up color), the author converts the RGB color model used in the image into the color model of Equation (2), which can easily and quickly calculate the relative brightness values of each pixel.
According to the principle of additive color in colorimetry, outdoor full-color LED displays are composed of three primary colors of RGB LEDs. Each pixel on the display can be assigned by controlling the luminous intensity of a certain primary color LED in each pixel. Various colors display colorful color images on the display. In the CIE (International Commission on Illumination) rg chromaticity diagram, chromaticity coordinates reflect the relative proportions of each of the three primary colors in the total tristimulus values. A set of chromaticity coordinates represents those colors with the same hue and same saturation but different brightness. Common characteristics.
Each pixel on the LED display can always find the corresponding area in the image to be measured. Therefore, the chromaticity of the pixel point can be determined by the RGB values in the image data in the corresponding area, and the calculation formula is as follows: Equation (3).
Assuming that the measured brightness value of the LED pixel is Y1 and the chromaticity coordinate is (r1, g1). By analyzing the dispersion of Y1 and (r1, g1), the LED pixel points with inconsistent brightness and chromaticity on the LED display can be determined.
In order to verify the effectiveness of the testing method, the author used an AvaSpec-2048 micro spectrometer to conduct a comparative test of the brightness and chromaticity of the unit module of the same outdoor full-color LED display. In order to reduce the calculation amount and facilitate debugging, the author adopted the CIE rg chromaticity coordinate system, which is different from the internationally accepted CIE xy chromaticity coordinate system used by the spectrometer. Therefore, the chromaticity coordinates should be converted during testing, as shown in Equation (4).
- Processing results and analysis
笔者利用 CCD 图像传感器采集图像,对三合一表贴户外全彩 LED 显示屏的单元模块中的 LED 像素点进行了算法测试。
Taking blue as an example, Figure 2 (a) shows the blue image displayed by the three-in-one surface-mount unit module captured by the CCD image sensor. In order to better verify the effectiveness of the detection method, the author masked some pixels of the LED display unit module to form the black part in Figure 2 (a).
Since the LED is a self-illuminator and the luminous intensity is proportional to the driving current provided to it within a certain range, during the design, manufacturing and debugging of the driving circuit, the brightness difference can be minimized by reasonably controlling the driving current. Calculated using the average value as a standard value, it should be less than 15% to 20%. Therefore, in order to facilitate subsequent brightness correction, the experiment positioned and counted LED pixels that deviated from the overall brightness average by more than 5% in order to control the brightness difference of these pixels with large deviations within 10%. When conducting chromaticity detection, this paper refers to McAdam (D. L. MacAdam) quantifies color latitude (as shown in Figure 3). Statistics the chromaticity coordinates of each LED pixel point, calculates the geometric center of these chromaticity coordinates, and records the Euclidean distance from the geometric center greater than d0 LED pixel point (different colors d0 have different values), as shown in Equation (5).
Table 1 shows the test results (taking blue as an example), where the luminance value Y1 is the relative luminance, proportional to the maximum luminance of 255; the chromaticity coordinate is (r1, g1).
The author used the AvaSpec-2048 micro spectrometer to conduct a comparative test on the same unit module, and the test results are shown in Table 2. The comparison shows that the detection method used in this paper is effective and feasible, with fast detection speed and high accuracy.
- conclusion
本文运用 CCD 图像传感器及数字图像处理技术对户外全彩 LED 显示屏的亮度、色度均匀性评价提出了一种新的快速检测方法,较好地保证了显示屏上各 LED 像素点显示效果的一致性,为后续的亮度、色度校正工作提供了定量调试的参考依据,能大大提高户外全彩 LED 显示屏的检测效率和显示质量。In the next step, we will continue to carry out research on the impact of ambient light on brightness and chroma detection and methods to overcome it, as well as the automatic correction driving circuit for brightness and chroma, and finally realize the brightness and chroma value of each LED pixel on the outdoor full-color display. Accurate detection and correction.
TAG:
Guess you want to see it


Popular information
-
What are the quality and installation requirements for installing LED displays in multi-functional s

-
Analysis of six characteristics of LED display application phenomena

-
To solve 2 problems, Octavia Optoelectronics and Ames Osram announced new patents
-
How to better select and use dedicated LEDs for full-color displays

-
Technical Chapter| What do you know about LED display device packaging technology?

-
What kind of LED full-color screen can meet indoor and outdoor needs?
-
Evolution history of led displays from monochrome to full-color to small-pitch
-
From modules to large screens, the entire process of LED display installation is introduced

-
Efficient and reliable quantum dot white LED packaging and thermal management
-
7 powerful ways to make LED display circuit board maintenance no longer difficult

the charts
- Liaocheng University and Soochow University collaborate to make progress in the research field of bl
- Hot research! How will the future development of LED displays achieve a leap?
- How to better select and use dedicated LEDs for full-color displays
- Introduction to LED process technology--Application of LED display driver chips
- Design of grayscale display scheme for HD LED display
- A new method for detecting brightness and chroma of outdoor full-color LED display
- Analysis of six characteristics of LED display application phenomena
- What are the quality and installation requirements for installing LED displays in multi-functional s
- What kind of LED full-color screen can meet indoor and outdoor needs?
- Analysis of factors affecting display prices